リーン機構を有するパーソナルモビリティの運動特性と周辺交通との干渉シミュレーション
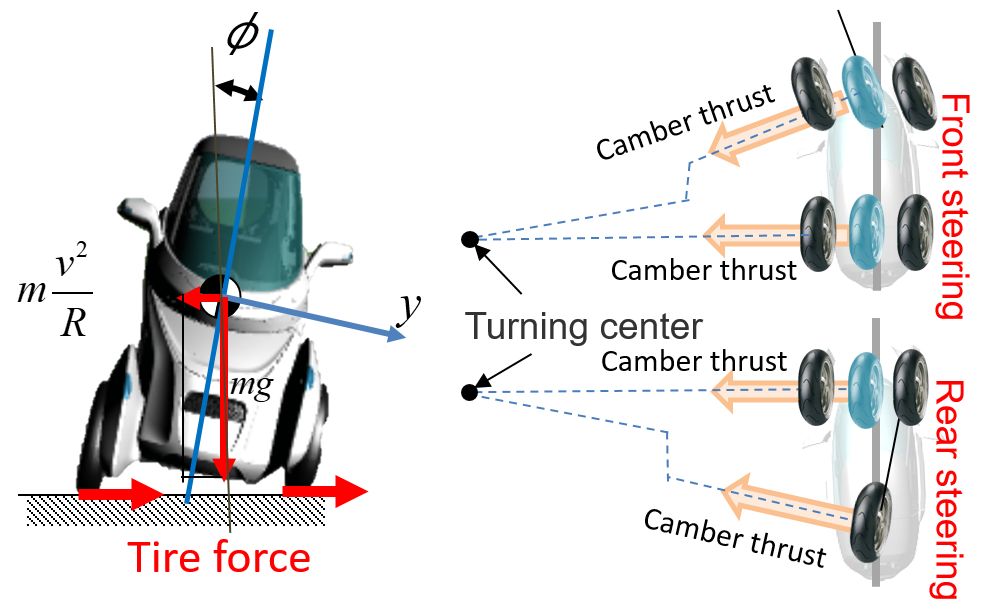
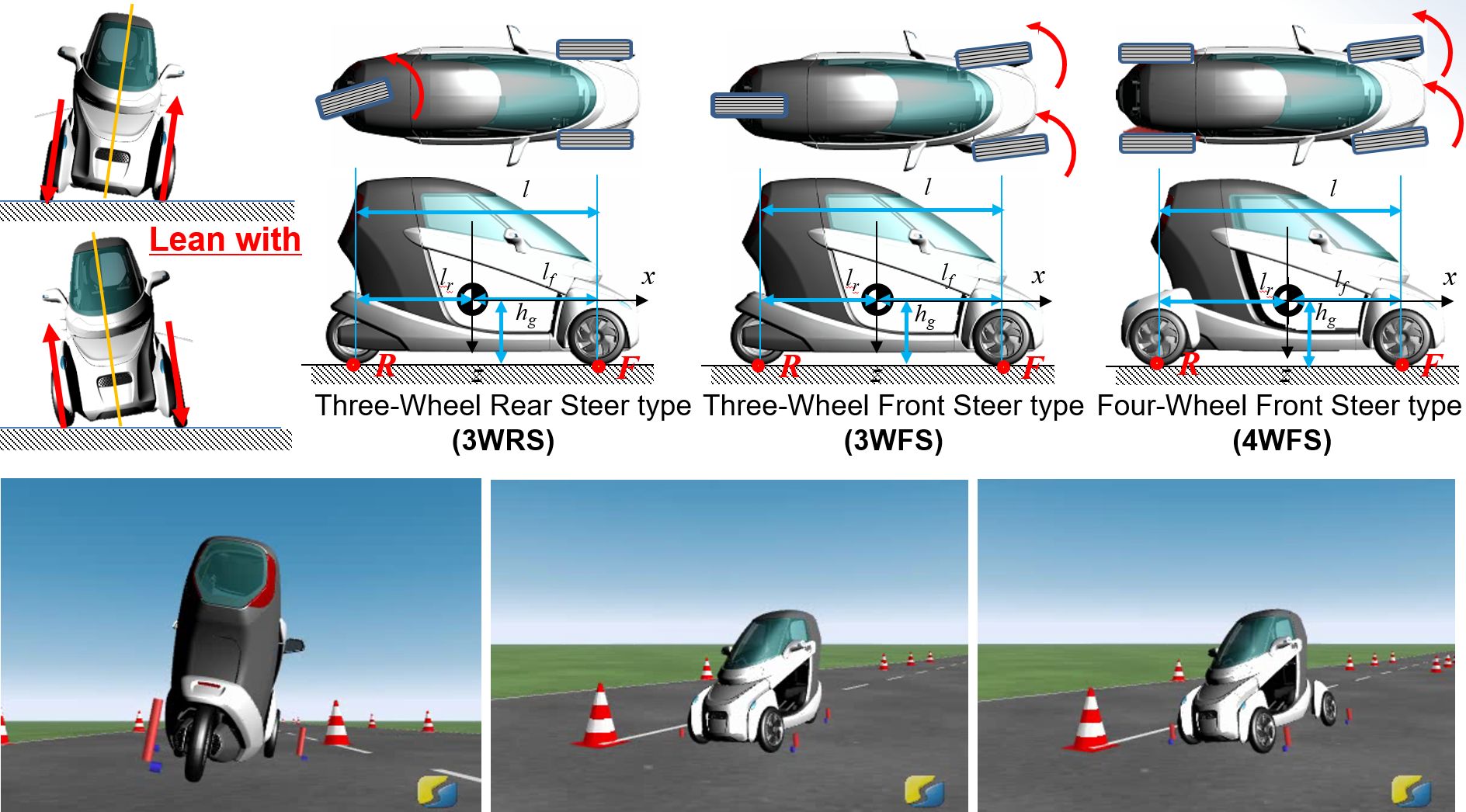
小型で低コストであり機動性の高い,新しいカテゴリーの移動手段としてパーソナルモビリティ(Personal Mobility Vehicle以下PMV)の需要が高まり,市販,研究開発,運用,実証社会実験が多方面で行われている.本研究では4輪車(または3輪)でありながら自動二輪車などと同様に旋回方向に対して内側に倒れ込む(リーン)ことにより旋回する車両を想定し,開発を進めている.
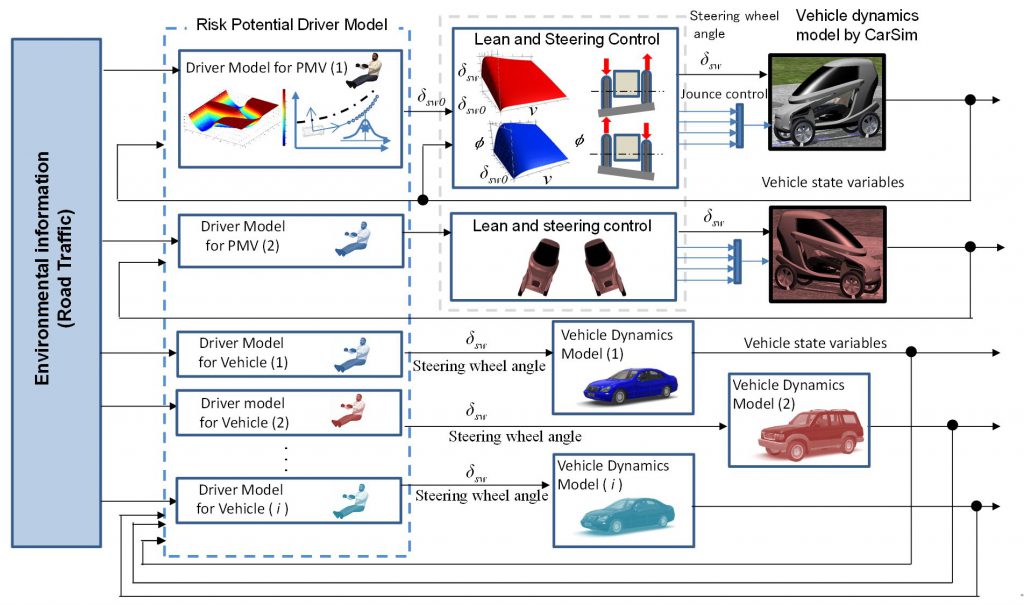
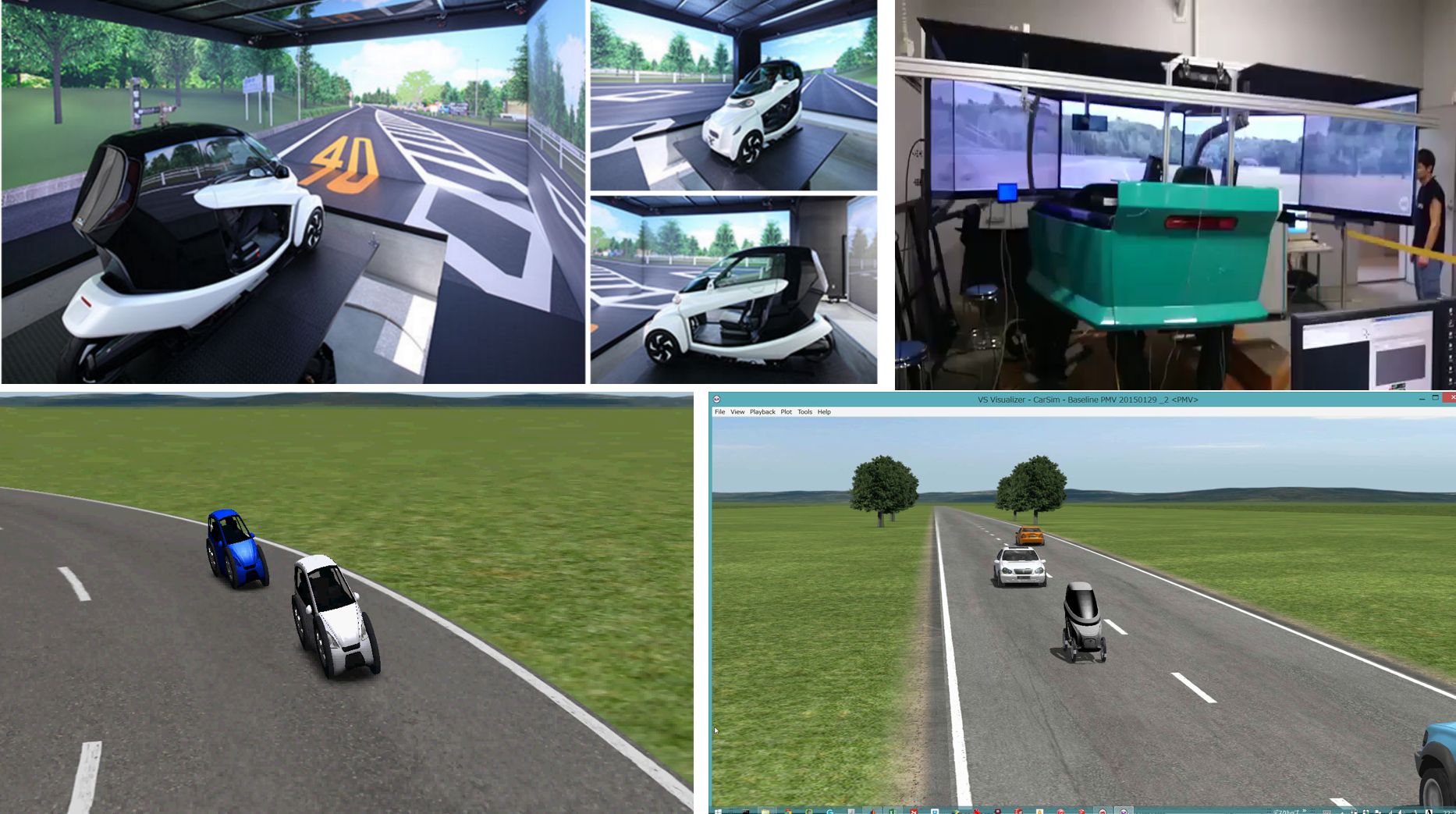
本研究では,通常の交通流の中において固有の運動特性と走行形態を持つ超小型モビリティの動きや車両の相互の間の干渉度合い等の検証など,ドライバの操縦動作を含めたダイナミクスと交通システム・ルール面からの合理的親和性確保のための検証と方策の提案を目的とする.
リーン機構を有するパーソナルモビリティの運動特性と運動制御に関する研究
4輪車(または3輪)でありながら自動二輪車などと同様に旋回方向内側に倒れ込む(リーン)ことにより旋回する機構を有する新しいPMVの研究開発プロジェクトを進めており,製品デザイン,社会的受容性検証,大型のドライビングシミュレータ(図1)を用いた車両の運動特性,HMI(Human Machin Interface)の最適化,プロトタイプの作成などを並行して進めている
本研究では,提案のPMV車両の運動性能の運動性能の検証を目的とする.特に,その固有の運動特性と車体形状から懸念される走行安定性の要因の一つとして挙げられる動的横転限界特性について,多自由度の運動力学シミュレーションモデルを用いて検討する.