とことんわかる自動車のモデリングと制御2022の講師務める
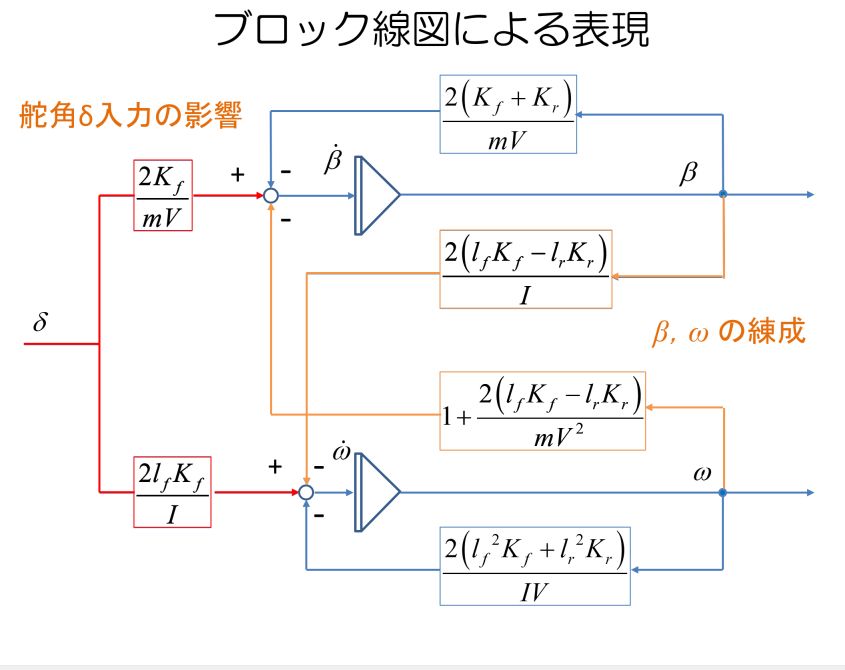
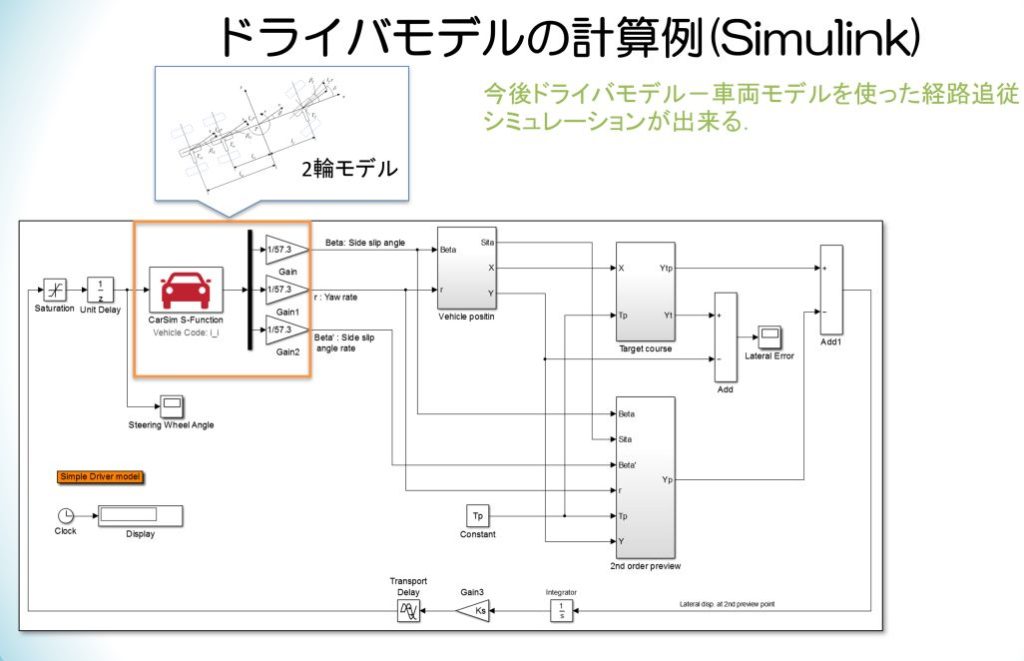
もう終わったことの記事ですが,2023年2月24日(金)オンライン開催(Zoom)にて日本機械学会 交通・物流部門 企画の講習会「とことんわかる自動車のモデリングと制御2022」において午前中2限目 (2)11:20-12:20 車両運動の基礎的なモデリング 大阪産業大学 金子 哲也 を務める.1限で車両運動の基礎理論と題して(タイヤ、サスペンション、線形2輪モデル、ドライバモデル)の基礎理論を幅広く講義された後の担当でした.いろいろ講義内容には悩みましたが,車両運動モデルとドライバモデルについて具体的にツールを使った計算方法を中心に講義しました.最後はマルチボディツールの使用例,ドライバモデルを使った車両誘導制御(リスクポテンシャル法)の例について解説しました. オンラインだと聴講者の顔が見えないのでやりずらい部分がありますが,アンケート結果を見ると概ね好評だったと感じました. 6月に毎年恒例の基礎セミナー「自動車の運動力学」があるので皆さん参加お願いします. 順番から行くと私は今年『運動方程式』担当です. This is an article about an event that has already taken place, but on February 24, 2023 (Friday), I gave a lecture at the Japan Society of Mechanical Engineers Traffic and Logistics Division's planned seminar "Tokoton Wakaru Automotive Modeling and Control 2022" held online (via Zoom) in the second session of the morning. (2) 11:20-12:20: Basic Modeling of Vehicle Motion Tetsuya Kaneko, Osaka Sangyo University, was in charge. After a wide-ranging lecture on the fundamentals of vehicle motion theory (tires, suspension, linear two-wheel models, driver models) titled "Fundamental Theory of Vehicle Motion" in the first session, I was in charge of the second session. I had some trouble deciding on the content of the lecture, but I focused on teaching the specific calculation methods using tools for vehicle motion models and driver models. Finally, I explained examples of using multibody tools and vehicle guidance control (risk potential method) using driver models. It was a bit difficult to do the lecture online without being able to see the faces of the attendees, but based on the survey results, I felt that it was generally well received. In June, there will be an annual basic seminar on "Vehicle Dynamics," so I hope everyone will participate. According to the order, I am in charge of "Equations of Motion" this year.