自律走行車両の制御目標生成アルゴリズムの開発
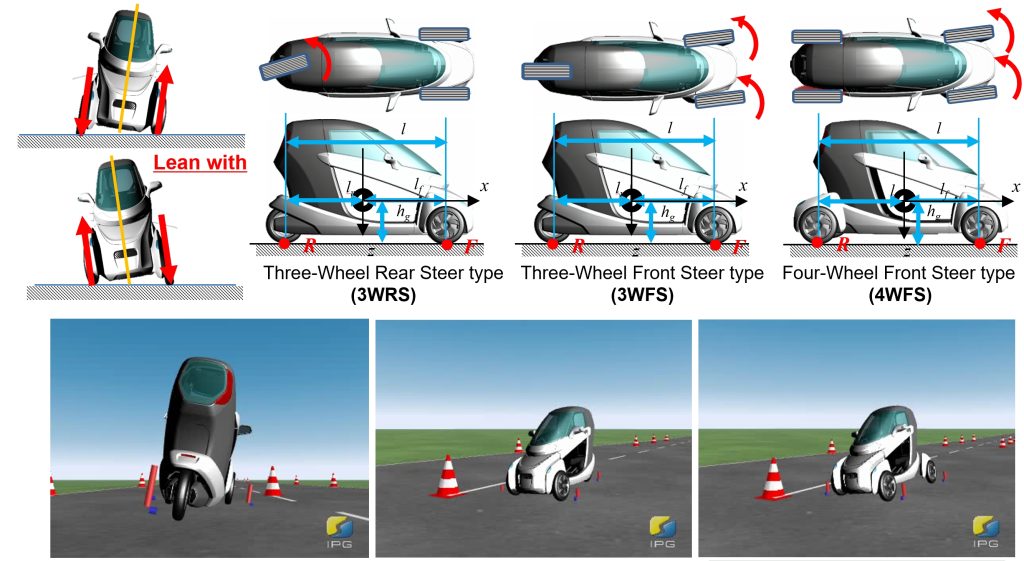
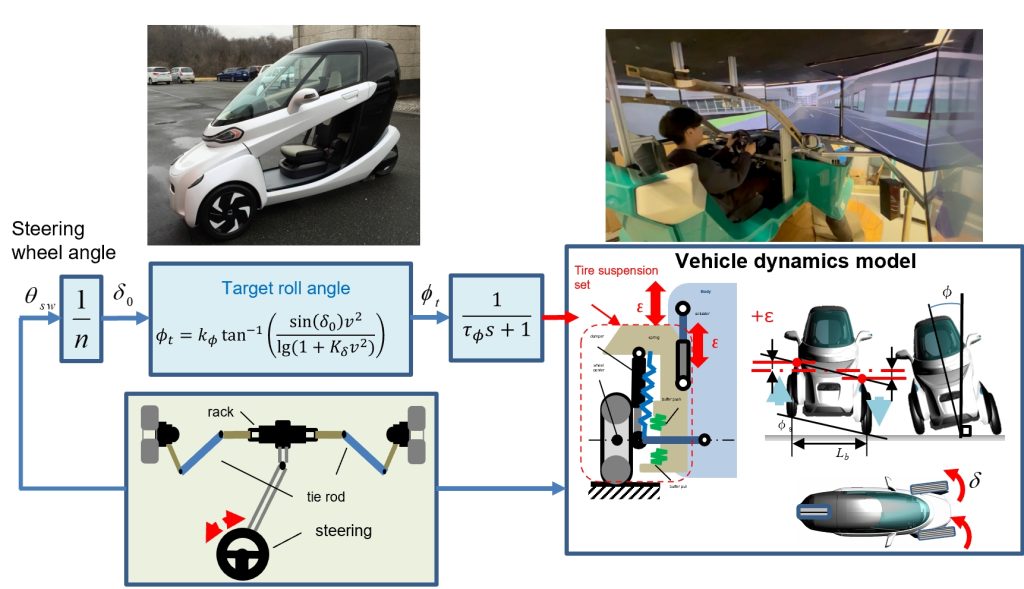
パーソナルモビリティビークル(PMV)の開発
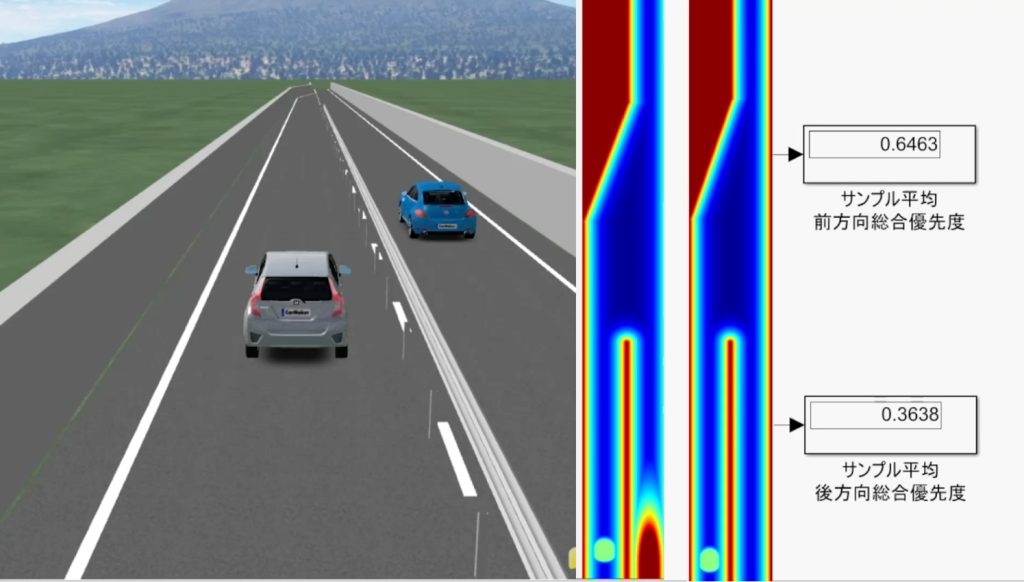
多様で複雑な交通環境下での自律走行車両の開発において,特に運転技能の高いドライバの感受する危険感覚(リスクポテンシャル,危険ポテンシャル)や車両運動性能を考慮した,交通流の調和を補完する制御目標生成アルゴリズムを開発しています.本アルゴリズムの有用性などを走行実験により検証しています
自動二輪車のように旋回方向に内傾する(リーン)旋回機構を有する新しいPMVの研究開発プロジェクトを産学共同により進めています.ここでは運動特性デザイン,社会的受容性,ドライビングシミュレータを用いた車両運動特性,HMIの最適化,プロトタイプの作成を進めています.

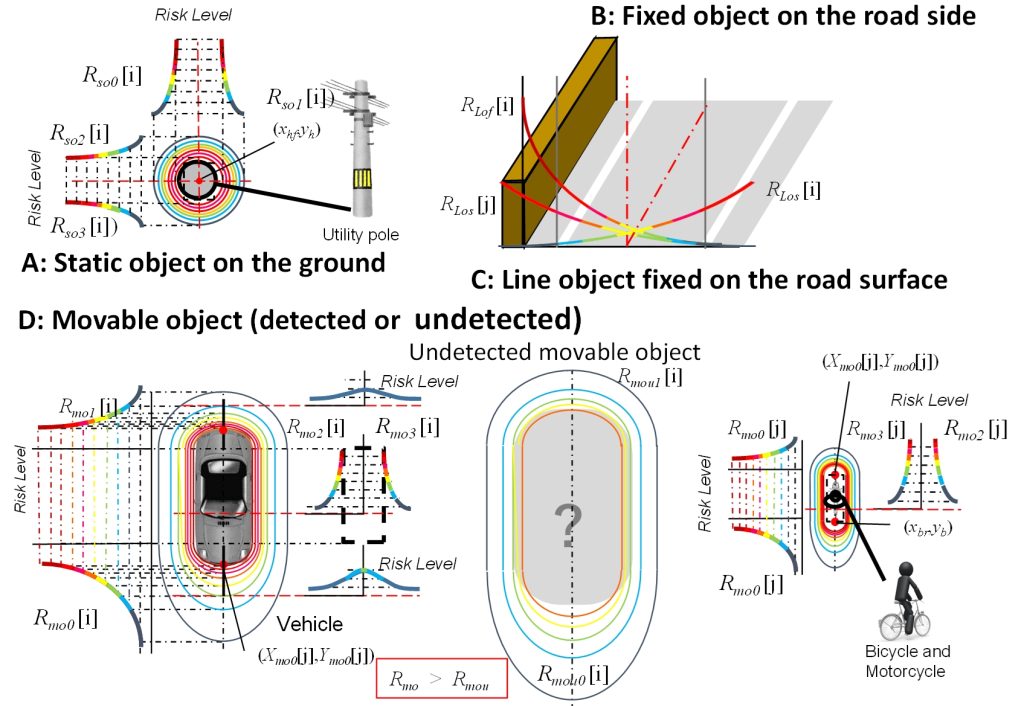
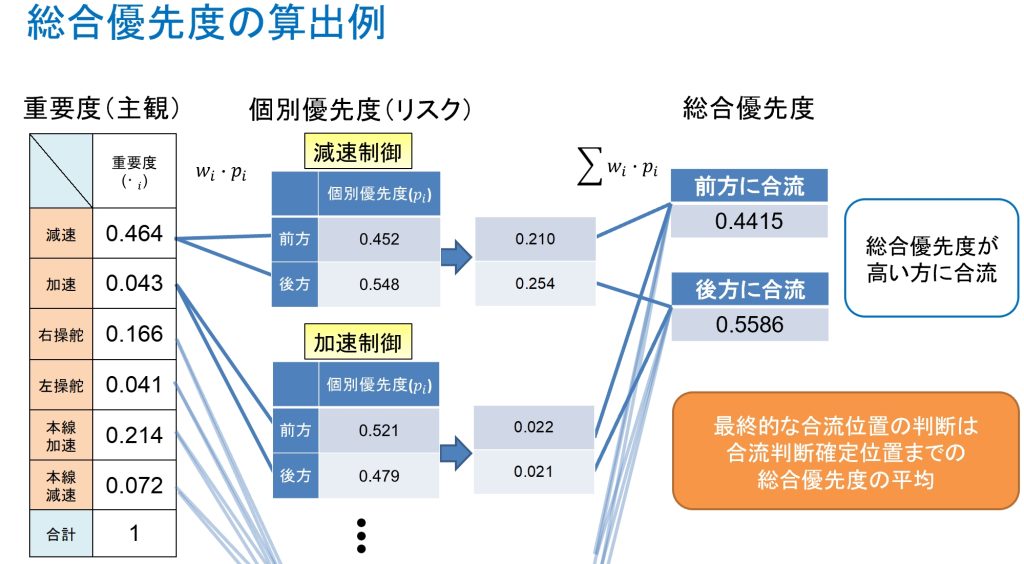
リスクポテンシャル評価指標を用いたドライバ運転行動意思決定モデルの研究
自律走行車両において、意思決定アルゴリズムは,環境認識,経路生成,車両誘導制御などを統括的に管理し,中枢となる要素といえます.本研究では,運転技能や安全予測能力の高いドライバの意志決定ロジックを規範とし,リスクポテンシャル情報を用いたAHP(階層分析法)による意思決定アルゴリズムの開発を行っています.
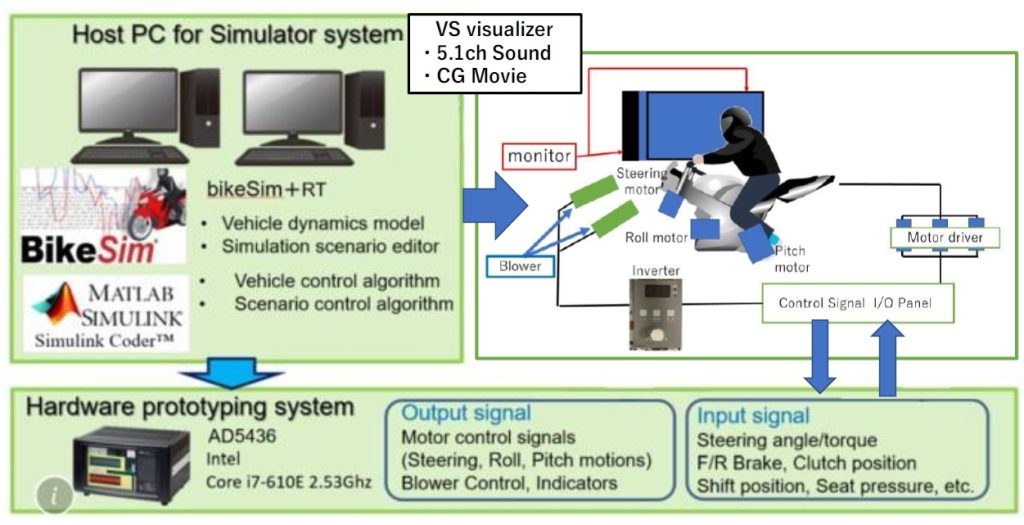
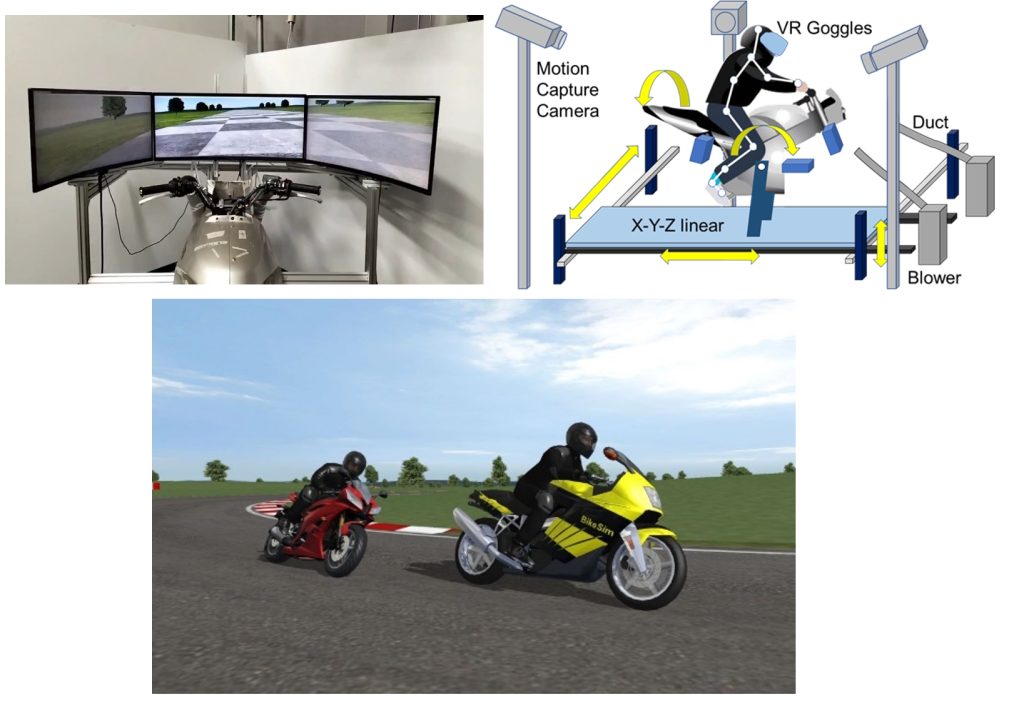
自動二輪車のライディングシミュレータの開発と現実感向上に関する研究
自動二輪車や次世代の多様なモビリティと道路交通インフラの調和を定量的に評価することが可能なツールとして,交通流シミュレータの開発を行っています.本研究では,実車の走行状態を疑似体験させる自動二輪車用ライディングシミュレータを構築し,交通流シミュレータに内挿する詳細な二輪車の運転動作モデル(ライダモデル)の開発を行っています.
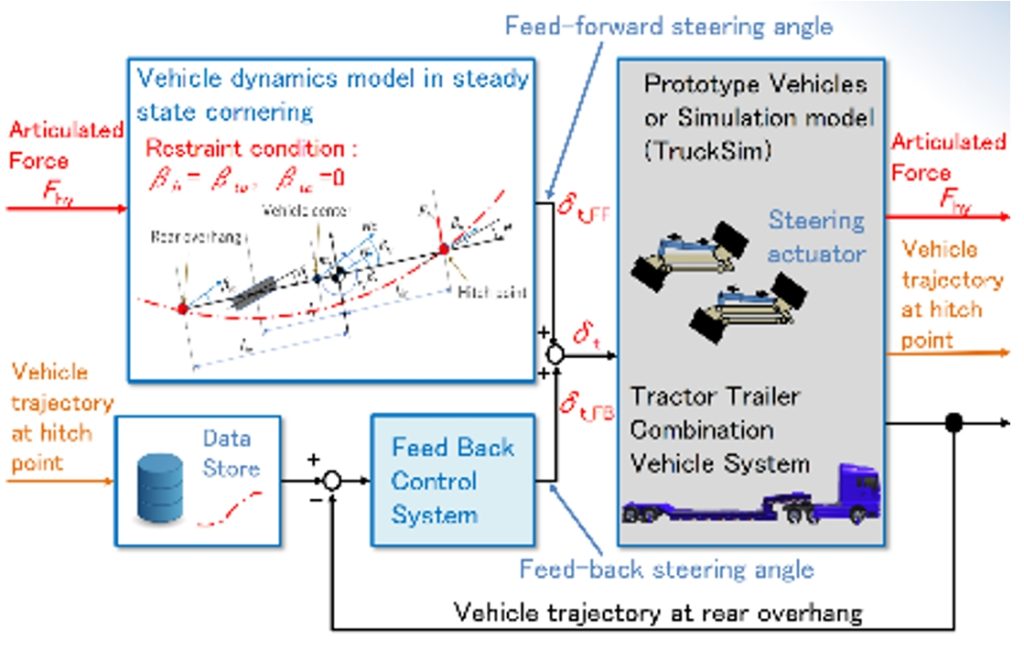
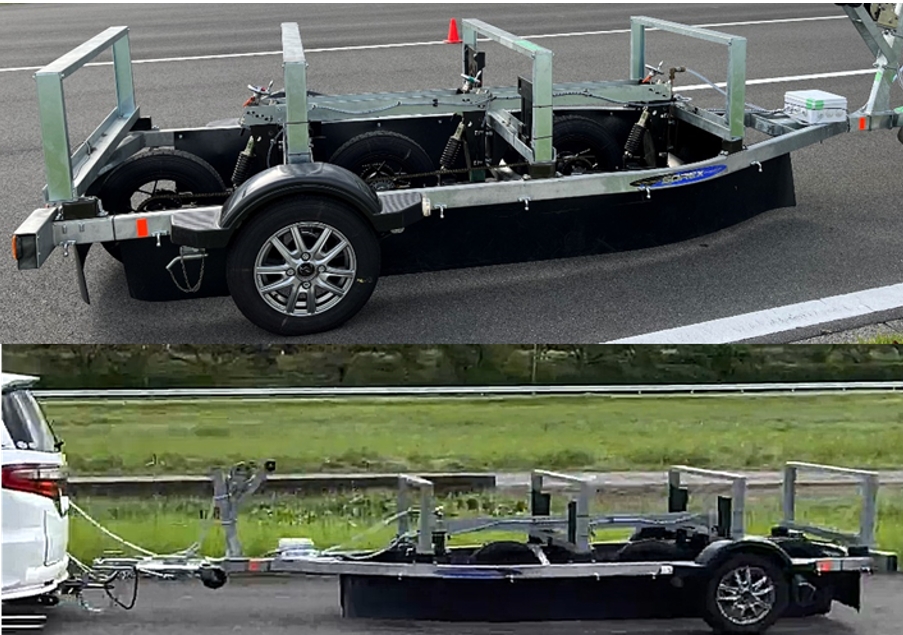
操舵機構を有する大型特殊トレーラ(被けん引車)の先進制御と自律走行化に関する研究
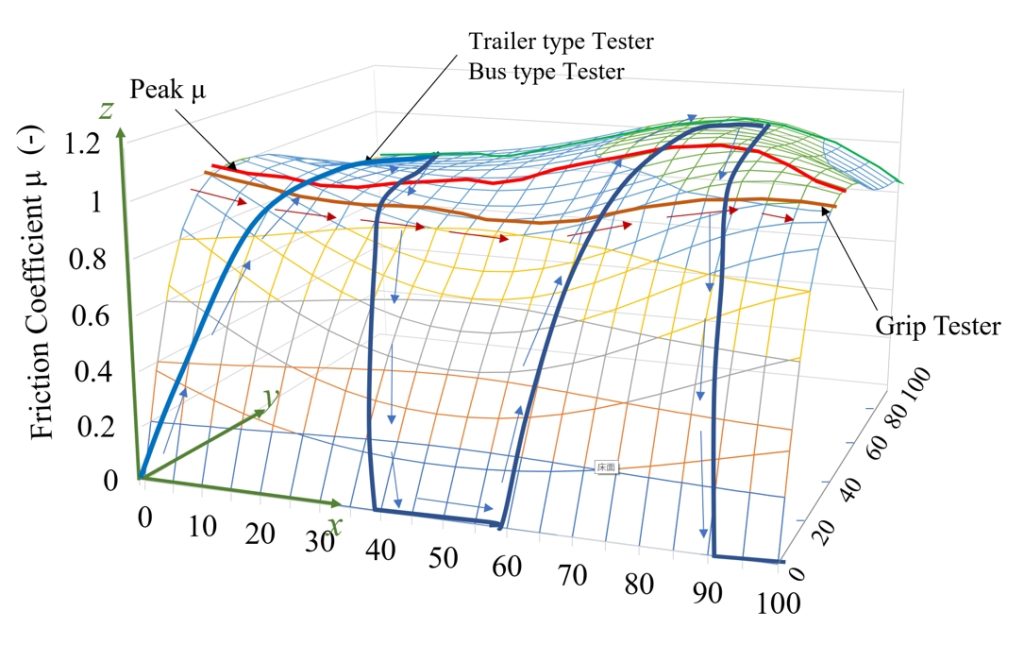
路面摩擦データベース構築とタイヤ特性データを活用した車両運動制御
先進化が進むトラクタ部(けん引車)との協調を目指し,トレーラ部への先進制御適用の可能性,実用性検討を行っています. 特に大型連結車両の走行時に問題となる車両の追従性の問題や連結車両のドライバに要求される高度な運転技術を補う制御手法,トレーラの独立した自律操舵制御について提案を行っています.
2020年から始まった産官学連携プロジェクト『先進路面摩擦データベース構築』における一般道路の路面摩擦特性データベースの構築,および降雪等を含めた天候変化に伴う影響,ならびにその時の環境情報など収集し,それらのデータを活用した路面摩擦推定手法の確立していきます. また,これらのデータベースを有効活用した車両運動制御を提案します.

Other Studies
人間-自動車システム
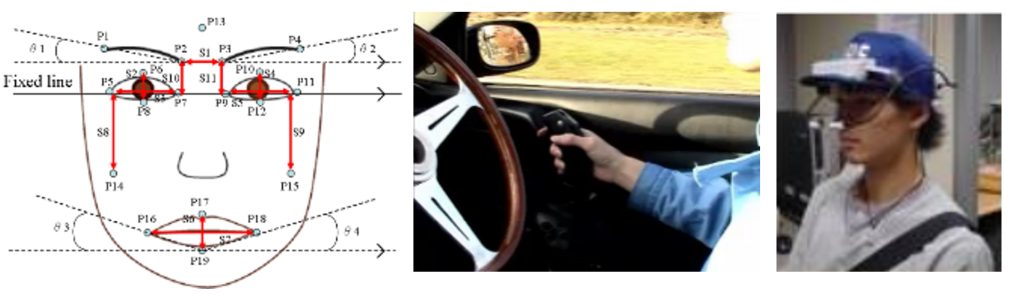
・官能評価指標としてのドライバの表情解析による情動推定
・ドライビングシミュレータの現実感向上とバーチャル酔い
・車両特性変化に対するドライバの感覚閾値と適応操作
・次世代車両のための新操作系の開発
・追従走行時の燃費解析のための車速コントロールドライバモデル
・自動二輪ライダーの運転姿勢計測手法の開発 ほか
自動車の運動力学と制御
・大型車自動隊列走行プロジェクト ーNEDO エネルギーITS-
・多重連結車両の運動解析モデル,制御用モデルの構築
・運動力学モデルを用いた大型連結車両(トレーラ)の横転事故の再現と解析手法
(解析協力:名古屋地方検察庁,東京地方検察庁,水戸地方検察庁,千葉地方検察庁 ほか)
・自動車の運転支援(ドライバサポート)システムの開発 ほか
